管道全位置自动焊接机


公司介绍  新闻中心 新闻中心
产品分类
联系方式
站内搜索 荣誉资质友情链接 |
管道全位置自动焊接机 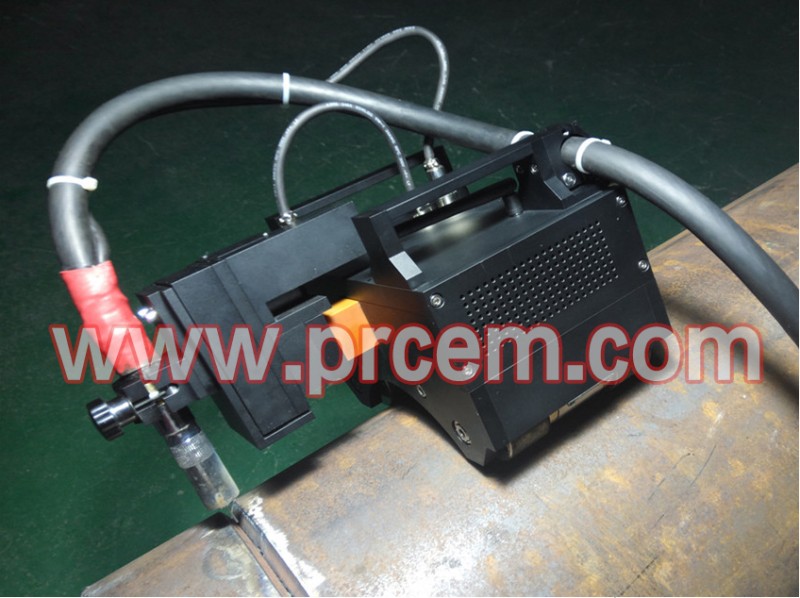 SCOWELD SCOWELD
智能型管道全位置自动焊机 一、工作原理 采用管子固定、焊接小车行走的方式实现全位置管道自动焊接,焊接工艺采用高效率、低成本的CO2气体保护焊。 二、 设备简介 SCOWELD管道全位置自动焊机(即管道爬行焊接小车)分为有轨式和无轨式,无轨式的采用磁力吸附于管道上,焊接时顺着焊道自动爬行,安装、使用及拆卸快速完成,非常便捷;有轨式主要用于不锈钢或无法磁力吸附的管道的焊接,轨道规格根据焊接需要进行按规格定制; 该SCOWELD管道全位置自动焊机广泛运用于石油、石化、化工、热力、天然气、海工、市政等各行各业管道的全位置自动焊接,采用管子固定、焊接小车行走的方式实现管道的全位置自动焊接,焊接工艺采用高效率、低成本的熔化极气体保护焊; SCOWELD全位置焊机主要特点在于设计轻巧便于携带,特别适合于施工现场的管道全自动焊接,具有操作易学、焊接速度快、生产效率高、焊缝机械性能好、劳动强度低等特点。 u 适用工件 1. 适用材质:碳钢、不锈钢,合金钢、低温钢等【不可磁力吸附的材质应另配小车轨道】 2. 适用壁厚:3-50mm 3. 适用管径:≥150mm以上 4. 适用焊丝:实心焊丝或药芯焊丝,焊丝直径Φ1.0-1.6mm 5. 适用位置:管道全位置焊,包括填充、盖面;如需氩弧焊打底由手工完成; 6. 适用焊缝:管子-管子焊缝、管子-弯头、三通、大小头等管件的焊缝 7. 适用工况:各种长输管线焊口、热力管道焊口埋地管道或工艺管道现场焊口,无论室内室外均可安全作业。 u 主要功能 管道全位置自动焊机采用先进设计理念和运动控制技术: u 控制方式:微电子PCB板+高清度液晶屏+智能防水软按钮控制 u 爬行驱动:恒扭矩电机+高精密行星减速机+蜗轮蜗杆驱动 u 摆动驱动:步进电机+高精密行星减速机+高精密直线滑轨 u 焊嘴高度调节:步进电机+高精密行星减速机+高精密直线滑轨 u 爬行小车结构:框架式结构,采用航空铝合金制作 u 控制特点:高清度液晶屏输入工艺参数,实现管道全位置360°分12个焊接区间,精确设定各个区间的焊接工艺,以CPLD微电子数字集成电路及FPGA芯片为核心,实现对各个电机的运动参数及焊接电流、焊接电压等的精确匹配 u 焊接电源:采用进口瑞典伊萨数字化气保焊接电源,实现焊材在焊接熔池的精确过渡控制。 u 配置明细:
|